1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
|
Image Thresholding {#tutorial_py_thresholding}
==================
Goal
----
- In this tutorial, you will learn Simple thresholding, Adaptive thresholding, Otsu's thresholding
etc.
- You will learn these functions : **cv2.threshold**, **cv2.adaptiveThreshold** etc.
Simple Thresholding
-------------------
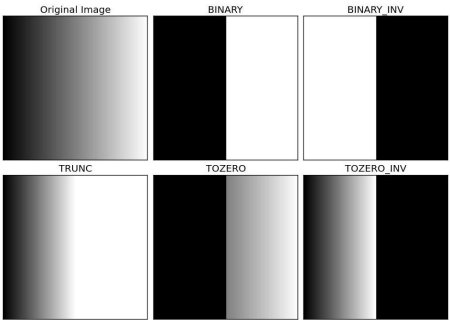
Here, the matter is straight forward. If pixel value is greater than a threshold value, it is
assigned one value (may be white), else it is assigned another value (may be black). The function
used is **cv2.threshold**. First argument is the source image, which **should be a grayscale
image**. Second argument is the threshold value which is used to classify the pixel values. Third
argument is the maxVal which represents the value to be given if pixel value is more than (sometimes
less than) the threshold value. OpenCV provides different styles of thresholding and it is decided
by the fourth parameter of the function. Different types are:
- cv2.THRESH_BINARY
- cv2.THRESH_BINARY_INV
- cv2.THRESH_TRUNC
- cv2.THRESH_TOZERO
- cv2.THRESH_TOZERO_INV
Documentation clearly explain what each type is meant for. Please check out the documentation.
Two outputs are obtained. First one is a **retval** which will be explained later. Second output is
our **thresholded image**.
Code :
@code{.py}
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('gradient.png',0)
ret,thresh1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
ret,thresh2 = cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)
ret,thresh3 = cv2.threshold(img,127,255,cv2.THRESH_TRUNC)
ret,thresh4 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO)
ret,thresh5 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV)
titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in xrange(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
@endcode
@note To plot multiple images, we have used plt.subplot() function. Please checkout Matplotlib docs
for more details.
Result is given below :
Adaptive Thresholding
---------------------
In the previous section, we used a global value as threshold value. But it may not be good in all
the conditions where image has different lighting conditions in different areas. In that case, we go
for adaptive thresholding. In this, the algorithm calculate the threshold for a small regions of the
image. So we get different thresholds for different regions of the same image and it gives us better
results for images with varying illumination.
It has three ‘special’ input params and only one output argument.
**Adaptive Method** - It decides how thresholding value is calculated.
- cv2.ADAPTIVE_THRESH_MEAN_C : threshold value is the mean of neighbourhood area.
- cv2.ADAPTIVE_THRESH_GAUSSIAN_C : threshold value is the weighted sum of neighbourhood
values where weights are a gaussian window.
**Block Size** - It decides the size of neighbourhood area.
**C** - It is just a constant which is subtracted from the mean or weighted mean calculated.
Below piece of code compares global thresholding and adaptive thresholding for an image with varying
illumination:
@code{.py}
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('sudoku.png',0)
img = cv2.medianBlur(img,5)
ret,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
th2 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_MEAN_C,\
cv2.THRESH_BINARY,11,2)
th3 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY,11,2)
titles = ['Original Image', 'Global Thresholding (v = 127)',
'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
images = [img, th1, th2, th3]
for i in xrange(4):
plt.subplot(2,2,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
@endcode
Result :

Otsu’s Binarization
-------------------
In the first section, I told you there is a second parameter **retVal**. Its use comes when we go
for Otsu’s Binarization. So what is it?
In global thresholding, we used an arbitrary value for threshold value, right? So, how can we know a
value we selected is good or not? Answer is, trial and error method. But consider a **bimodal
image** (*In simple words, bimodal image is an image whose histogram has two peaks*). For that
image, we can approximately take a value in the middle of those peaks as threshold value, right ?
That is what Otsu binarization does. So in simple words, it automatically calculates a threshold
value from image histogram for a bimodal image. (For images which are not bimodal, binarization
won’t be accurate.)
For this, our cv2.threshold() function is used, but pass an extra flag, cv2.THRESH_OTSU. **For
threshold value, simply pass zero**. Then the algorithm finds the optimal threshold value and
returns you as the second output, retVal. If Otsu thresholding is not used, retVal is same as the
threshold value you used.
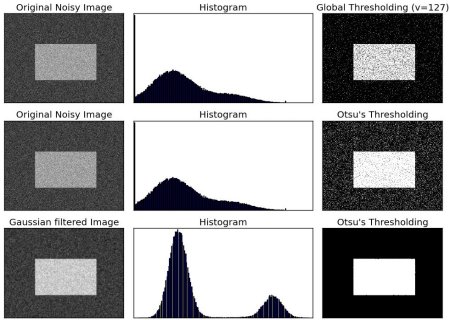
Check out below example. Input image is a noisy image. In first case, I applied global thresholding
for a value of 127. In second case, I applied Otsu’s thresholding directly. In third case, I
filtered image with a 5x5 gaussian kernel to remove the noise, then applied Otsu thresholding. See
how noise filtering improves the result.
@code{.py}
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('noisy2.png',0)
# global thresholding
ret1,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
# Otsu's thresholding
ret2,th2 = cv2.threshold(img,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
# Otsu's thresholding after Gaussian filtering
blur = cv2.GaussianBlur(img,(5,5),0)
ret3,th3 = cv2.threshold(blur,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
# plot all the images and their histograms
images = [img, 0, th1,
img, 0, th2,
blur, 0, th3]
titles = ['Original Noisy Image','Histogram','Global Thresholding (v=127)',
'Original Noisy Image','Histogram',"Otsu's Thresholding",
'Gaussian filtered Image','Histogram',"Otsu's Thresholding"]
for i in xrange(3):
plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray')
plt.title(titles[i*3]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256)
plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray')
plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([])
plt.show()
@endcode
Result :
### How Otsu's Binarization Works?
This section demonstrates a Python implementation of Otsu's binarization to show how it works
actually. If you are not interested, you can skip this.
Since we are working with bimodal images, Otsu's algorithm tries to find a threshold value (t) which
minimizes the **weighted within-class variance** given by the relation :
\f[\sigma_w^2(t) = q_1(t)\sigma_1^2(t)+q_2(t)\sigma_2^2(t)\f]
where
\f[q_1(t) = \sum_{i=1}^{t} P(i) \quad \& \quad q_1(t) = \sum_{i=t+1}^{I} P(i)\f]\f[\mu_1(t) = \sum_{i=1}^{t} \frac{iP(i)}{q_1(t)} \quad \& \quad \mu_2(t) = \sum_{i=t+1}^{I} \frac{iP(i)}{q_2(t)}\f]\f[\sigma_1^2(t) = \sum_{i=1}^{t} [i-\mu_1(t)]^2 \frac{P(i)}{q_1(t)} \quad \& \quad \sigma_2^2(t) = \sum_{i=t+1}^{I} [i-\mu_1(t)]^2 \frac{P(i)}{q_2(t)}\f]
It actually finds a value of t which lies in between two peaks such that variances to both classes
are minimum. It can be simply implemented in Python as follows:
@code{.py}
img = cv2.imread('noisy2.png',0)
blur = cv2.GaussianBlur(img,(5,5),0)
# find normalized_histogram, and its cumulative distribution function
hist = cv2.calcHist([blur],[0],None,[256],[0,256])
hist_norm = hist.ravel()/hist.max()
Q = hist_norm.cumsum()
bins = np.arange(256)
fn_min = np.inf
thresh = -1
for i in xrange(1,256):
p1,p2 = np.hsplit(hist_norm,[i]) # probabilities
q1,q2 = Q[i],Q[255]-Q[i] # cum sum of classes
b1,b2 = np.hsplit(bins,[i]) # weights
# finding means and variances
m1,m2 = np.sum(p1*b1)/q1, np.sum(p2*b2)/q2
v1,v2 = np.sum(((b1-m1)**2)*p1)/q1,np.sum(((b2-m2)**2)*p2)/q2
# calculates the minimization function
fn = v1*q1 + v2*q2
if fn < fn_min:
fn_min = fn
thresh = i
# find otsu's threshold value with OpenCV function
ret, otsu = cv2.threshold(blur,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
print thresh,ret
@endcode
*(Some of the functions may be new here, but we will cover them in coming chapters)*
Additional Resources
--------------------
-# Digital Image Processing, Rafael C. Gonzalez
Exercises
---------
-# There are some optimizations available for Otsu's binarization. You can search and implement it.
|
