1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
|
Features2D + Homography to find a known object {#tutorial_feature_homography}
==============================================
@tableofcontents
@prev_tutorial{tutorial_feature_flann_matcher}
@next_tutorial{tutorial_detection_of_planar_objects}
| | |
| -: | :- |
| Original author | Ana Huamán |
| Compatibility | OpenCV >= 3.0 |
Goal
----
In this tutorial you will learn how to:
- Use the function @ref cv::findHomography to find the transform between matched keypoints.
- Use the function @ref cv::perspectiveTransform to map the points.
\warning You need the <a href="https://github.com/opencv/opencv_contrib">OpenCV contrib modules</a> to be able to use the SURF features
(alternatives are ORB, KAZE, ... features).
Theory
------
Code
----
@add_toggle_cpp
This tutorial code's is shown lines below. You can also download it from
[here](https://github.com/opencv/opencv/tree/master/samples/cpp/tutorial_code/features2D/feature_homography/SURF_FLANN_matching_homography_Demo.cpp)
@include samples/cpp/tutorial_code/features2D/feature_homography/SURF_FLANN_matching_homography_Demo.cpp
@end_toggle
@add_toggle_java
This tutorial code's is shown lines below. You can also download it from
[here](https://github.com/opencv/opencv/tree/master/samples/java/tutorial_code/features2D/feature_homography/SURFFLANNMatchingHomographyDemo.java)
@include samples/java/tutorial_code/features2D/feature_homography/SURFFLANNMatchingHomographyDemo.java
@end_toggle
@add_toggle_python
This tutorial code's is shown lines below. You can also download it from
[here](https://github.com/opencv/opencv/tree/master/samples/python/tutorial_code/features2D/feature_homography/SURF_FLANN_matching_homography_Demo.py)
@include samples/python/tutorial_code/features2D/feature_homography/SURF_FLANN_matching_homography_Demo.py
@end_toggle
Explanation
-----------
Result
------
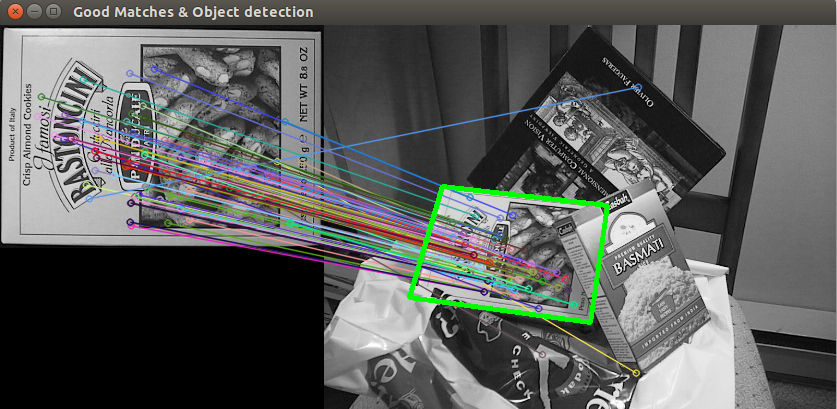
- And here is the result for the detected object (highlighted in green). Note that since the homography is estimated with a RANSAC approach,
detected false matches will not impact the homography calculation.
|
